- 电传操纵技术

电传操纵技术
简介
从飞机发明直到现在,飞机的操纵系统仍然主要是机械式的操纵系统。机械操纵系统在操纵装置(操纵杆、脚蹬)和飞机的舵机之间存在着一套相当复杂的机械联动装置和液压管路,飞行员操纵操纵杆和脚蹬,通过上述联动装置控制舵机位置,从而使飞机达到希望的姿态和航向。 电传操纵技术早期的飞机只是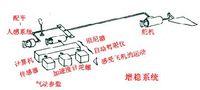 直接人工机械操纵。随着飞机的尺寸和速度的增加,驾驶员再直接通过钢索去拉动舵面感到困难,于是作为驾驶员辅助操纵装置的液压助力器安装在操纵系统中。它由一个并联的液压作动器来增大驾驶员施加在操纵钢索上的作用力,目前液压助力器仍在许多飞机上使用。
直接人工机械操纵。随着飞机的尺寸和速度的增加,驾驶员再直接通过钢索去拉动舵面感到困难,于是作为驾驶员辅助操纵装置的液压助力器安装在操纵系统中。它由一个并联的液压作动器来增大驾驶员施加在操纵钢索上的作用力,目前液压助力器仍在许多飞机上使用。
历史
第二次世界大战后不久,出现了全助力操纵系统。在这种系统中,操纵钢索从驾驶杆直接连到作动器的伺服阀上,不再与操纵面发生直接机械联系。使用全助力操纵的主要原因是在跨音速飞行时,作用在操纵面上的力变化很大而且非线性很厉害。这样,操纵时从操纵面反传到驾驶杆上的力从操纵品质的观点来说是难以接受的。全助力操纵系统本身是不可逆的,因此不受跨音速飞行中非线性力的影响,由于这种操纵方法不再需要飞行员的体力去改变舵面状态,使得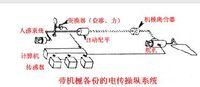 飞行员无法直观地感受到飞机所处的状态,于是就借助一些力反馈装置来提供人工杆力,这种人工杆力虽然在移动操纵面时不需要,但在操纵飞机时给飞行员提供适当的操纵品质还是必要的,人工杆力的设计可以使人的操纵感觉从亚音速飞行平滑地过渡到超音速飞行阶段。
飞行员无法直观地感受到飞机所处的状态,于是就借助一些力反馈装置来提供人工杆力,这种人工杆力虽然在移动操纵面时不需要,但在操纵飞机时给飞行员提供适当的操纵品质还是必要的,人工杆力的设计可以使人的操纵感觉从亚音速飞行平滑地过渡到超音速飞行阶段。
原理
随着飞机尺寸的继续增加和性能的进一步提高,增加稳定性帮助飞行员操纵变得十分迫切,于是从全助力操纵系统发展到增稳系统,如偏航增稳系统、俯仰增稳系统和横滚增稳系统。系统通过传感器反馈的飞机状态,在程序控制下自动控制舵机偏转,以保证飞机静稳定性。这种增稳系统与驾驶杆或脚蹬是互相独立的,因而增稳系统的工作不影响驾驶员的操纵。
从增稳系统发展到电传操纵(FBW)系统只是很小的一步,通过加上一个离合器或其它使机械系统在不使用时断开的方法便可以实现,“协和”超音速客机上就装有这种系统。 
把电传操纵系统中的机械备份完全去掉就变成了全电传操纵(FFBW)系统。
在这里我们已经能够给电传操纵系统下一个定义了:电传操纵(Flying By Wire)系统是将飞行员的操纵信号,经过变换器变成电信号,通过电缆直接传输到自主式舵机的一种系统。它去掉了传统的飞机操纵系统中布满飞机内部的从操纵杆到舵机之间的机械传动装置和液压管路。电传操纵系统的主要组成部分包括运动传感器、中央计算机、作动器和电源,它相当于动物的感觉器官、大脑和肌肉。
由飞机操纵系统的发展我们可以体会到,任何事物的发展都是由需要和可能这两个因素决定的,电传操纵系统的发展也是如此。它是随着飞机(包括某些飞行器)的飞行控制技术的不断提高以及科学技术的发展而逐渐发展起来的。
作用
电传操纵的重要性在于打破了飞机设计中需要保持静稳定性的布局,设计师们可以为战斗任务选择和优化最有效的布局,然后由储存在飞行控制计算机软件中的相应控制律增加人工稳定性。现役战斗机中已经有多种飞机采用电传操纵系统,例如F-16、幻影2000、“狂风”战斗机、F-15、Su-27、F/A-18等等。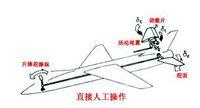
技术发展
随着电子技术的发展和飞机性能的不断提高,飞机的操纵系统也发生了脱胎换骨的变化,操纵杆系和钢索已被电线所取代,飞行员操纵飞机依靠装在驾驶杆处的传感器将杆力或杆位移转换成电信号,通过电线传到舵机以驱动控制面偏转,达到操纵飞机的目的,这就是电传操纵系统。
电传操纵系统不单是用电线代替操纵杆系就可以了,它还具有计算机,计算机接收飞行员的控制输入以及传感器测得的飞机状态反馈信号来计算对舵机的指令。正因为在飞行操纵系统中引入了计算机和反馈信号,使系统性能产生了质的飞跃,因而电传操纵系统称为电传飞行控制系统似乎更为合适。
电传飞行控制系统不仅重量轻,操纵中没有因摩擦引起的滞后,可减少维修量,而且还可以通过放宽静稳定性(可提高机动性,减小配平阻力)、阵风减载、机动载荷控制、机翼和机身结构振型的阻尼及颤振抑制等主动控制技术提高飞机的性能。
最早采用电传飞行控制系统的飞机是美国的F-16A/B,当时因数字计算机技术还未发展到一定水平,因而采用了模拟式电传系统,为保证安全可靠采用了四余度结构。但因模拟系统的计算能力有限,使飞机性能受到一定的限制。故美国后来的F-16C/D和国外新研制的一些飞机都采用了性能更好的数字式电传系统。据不完全统计,电传飞行控制系统已用在下列飞行器上:
战斗机—F-16A/B,F-16C/D,F/A-18,F-117,F-22,“幻影”2000,“阵风”,EF2000,JAS39,苏-27,苏-35,台湾的IDF,印度的LCA;
·轰炸机—B-2;
·军用运输机—C-17;
·直升机—RAH-66,V-22,NH-90;
·客机—A320,A330/A340,波音777;
下面对国外一些新的电传飞行控制系统作一个简单的介绍。
F-117隐身战斗机的研制因为要赶进度,所以其安装的很多设备都是从一些已有的战斗机设备拼凑起来的,其电传飞行控制系统采用F-16A/B的四余度模拟式电传系统,但软件不同,输入量不像F-16那样采用杆力,而是杆位移。俯仰控制律基本上采用G指令,有一个迎角限制器。F-117按稳定的轰炸平台作了设计优化,电传系统可使飞机更加稳定。F-117由于要满足隐身要求,形状奇特,因而机体本身是静不稳定的,没有电传系统提供稳定就无法飞行。另外,F-117的全功能、四轴(包括定时)自动驾驶仪系统已增加了油门控制,大大减轻了在目标上空作轰炸飞行期间飞行员的工作负荷。飞行员通常在自动驾驶仪/自动油门系统接通下进行轰炸。这些系统的定时非常精确,以保证飞机具有很高的武器投放精度。
F-22战斗机的电传飞机控制系统称为飞行器管理系统(VMS),它综合了飞行与推进控制,推力矢量控制也包括在内。VMS由利尔航宇电子公司研制,取插入F-22航空电子机架的模块的形式,德克萨斯仪器公司为系统提供通用的1750A处理器模块。以前的战斗机电传系统都采用四余度结构,F-22是第一种采用三余度飞行控制计算机的战斗机,而且没有电气或机械备份模式。飞机上配备了两个27.6×106帕的液压系统,但每个控制面上只有一个舵机,以减轻重量和降低成本。VMS控制14个控制面:水平尾翼、升降舵、副翼、襟副翼、前缘襟翼以及进气道放气门和旁路门,从而使采用许多控制重构模式成为可能,这些重构模式在出现一个舵机或液压故障时可使飞机安全飞行。此外,每个舵机上的补偿器在出现液压故障时,可为舵机提供刚度。因F-22是一种可作过失速机动的飞机,故其电传控制系统没有迎角限制,但过载和滚转速率作为飞行条件、燃油状态和外挂装载状态的函数受到限制,以防止结构过载。F-22将具有整个包线范围内的全过载保护,而F-16只有纵向的结构过载限制,有可能在滚转方面产生过应力。
B-2隐身轰炸机为无尾飞翼设计,其特点是机翼面积大,翼载低,升阻比高,因而在航程和装载量方面有优势。
其主控制面由机翼后缘三组升降副翼操纵俯仰和滚转。最外一组控制面可上下分裂张开,构成阻力方向舵操纵偏航,并能作辅助俯仰滚转操纵,也可用作减速板。B-2飞行控制系统为四余度数字电传系统,具有放宽稳定性,阵风减载和乘座品质控制等功能。除增稳外,还具有自动驾驶仪功能,以及与导航、地形跟随、发动机油门控制、火力控制和其他航空电子设备交联。B-2的四余度飞控计算机的每个计算机包含PACE1750A微处理器,计算速度为每秒200万次。
A320客机是第一种采用电传飞行控制系统的民用运输机,所有飞行控制面由飞机三个独立的液压源驱动,而且都由电信号控制。滚转轴和升降舵单独由电控制,而可配平水平安定面(THS)和方向舵则由电和机械混合控制,故在电气全部发生故障的情况下,仍能对A320进行控制。飞行员的主俯仰和滚转控制无机械连接,靠侧驾驶杆实施控制。因为A320是客机,故对电传系统的余度设计有更高的要求。主飞行控制系统采用了7个数字计算机:2个ELAC,提供升降舵、副翼和THS控制,为所有轴提供正常控制律(为四通道系统);3个SEC,提供扰流板、升降舵和THS控制,仅能计算重构的控制律;2个FAC,通过偏航阻尼器提供方向舵控制,也能计算方向舵行程限制和方向舵配平控制。A320的电传系统还组合了阵风减载系统,系统的作用是把翼根处由阵风引起的总的对称向上弯曲力矩(由阵风载荷与1G引起)减小15%,从而减轻机翼根部的结构。系统采用安装在机翼中心线上的垂直加速度计,加速度计信号先通过一个抗混淆滤波器,然后经飞控计算机送到阵风减载控制面(副翼和两个外侧扰流板)舵机,通过控制面的偏转来减轻阵风载荷。
A330/A340客机的控制律基本上与A320的相同,它具有正常、备用和直接三个等级,分别与不同的计算机故障相对应。正常和备用都是很精的控制,飞机处于伺服回路内,可根据实际机动性能调整反馈。备用控制律在多数场合与正常控制律相同,但正常控制律具有全飞行包线保护,备用控制律只有部分包线保护。正常和备用控制律的侧驾驶杆俯仰指令为G指令,在杆处于中立位置时指令为1G。直接控制律基本上与机械操纵飞机相似,侧杆指令与舵面偏转成正比,伺服回路由飞行员闭合。A330/A340的飞控主计算机(FCPC)基于英特尔386微处理器,3个主计算机由不同部门采用互不相同的途径研制,以避免公共误差。2个飞控辅助计算机(FCSC)基于英特尔186微处理器。还有两个飞行控制数据集中器(FCDC),使飞行控制系统与其他系统接口并提供隔离。这些计算机都是赛克斯坦航空电子公司制造的。
计算机的两项主要任务是:(1)按控制律计算飞行控制或飞行控制律输入;(2)为舵面作动提供电信号。
波音777客机的主飞行控制系统为电传飞行控制系统,它具有以下设计特点:(1)控制面采用先进的控制律进行全时间控制。(2)改进控制特性,保留常规系统的良好特性,去掉不良特性。(3)提高可靠性和维修性。系统采用了两种电子计算机:舵机控制电子装置(ACE)和主飞行计算机(PFC)。ACE主要是一种模拟设备,其功能是与飞行员控制传感器接口,并以模拟伺服回路控制舵机。系统有4个相同的ACE,它将飞行员控制器位置和舵面位置信号转换成数字量,然后通过ARINC629总线传给PFC。PFC由英国GEC-马可尼航空电子公司研制,其作用是计算控制律,它采用上述位置信号计算舵面指令,然后将舵面指令通过ARINC629总线传回ACE,由ACE转换成模拟信号,用来控制舵机。系统中有三个PFC(即3个通道),每个PFC内有3组微处理器(即3条支路)。PFC内部如果有一条支路发生故障,只切断那条支路,该通道仍可继续工作。如果有两条支路发生故障,则切断该通道。波音777的飞行控制系统采用包线保护而不是包线限制。飞行员可选用备用控制模式。扳动驾驶舱内的一个开关,就可将系统由数字系统转变为纯模拟系统。如果丧失所有电源,则飞行员可用钢索操纵水平安定面和扰流板舵机来进行基本的俯仰和滚转控制。
电传飞行控制系统的试飞至关重要,电传飞行控制系统虽然具有很好的性能,但由于它是一种高增益系统,与普通飞行操纵系统有着本质的不同,容易由于其本身的变化或外界条件的改变突然产生飞行员诱发振荡。因此在设计时不能片面追求操纵性能,更要注意使它不易产生飞行员诱发振荡。对电传飞行控制系统必须进行彻底模拟和分析,找出一切隐患。电传飞行控制律在变稳飞机上试飞是发现飞行员诱发振荡的重要手段。美国在F-22出厂前一年多就对其电传飞行控制律在F-16变稳飞机上进行试飞。
目前,电传飞行控制系统正在向自适应飞行控制系统的方向发展。美国早在60年代初就对自适应飞行控制系统作了试飞,以后在不断进行研究和试验,但始终没有在生产型飞机上使用过,究其原因可能是性能还不够完善。
但未来随着马赫数高达6~8的高超音速飞机的到来,以及为减小阻力和提高隐身特性的无尾飞机的出现,飞机的气动特性变化范围很大,用常规飞行控制方法很难胜任,必须采用自适应控制。而且,军用机在作战中部分控制面被打坏或民用机个别控制面因故障而不能工作,这时也需要自适应控制系统自动诊断故障并进行重构。新一代的自适应飞控系统由于计算工作量很大,将采用并行处理和神经网络技术,并将采用光纤来传输大量数据,由电传飞行控制系统发展成光传飞行控制系统。


-

一汽 推进L4级自动驾驶技术落地
2025-09-29 09:56:35 查看详情 -
一汽红旗E 推进L4级自动驾驶技术落地
2025-09-29 09:56:35 查看详情 -
沃尔沃宣布将推纯电MPV 全新纯电旗舰SUV技术前瞻
2025-09-29 09:56:35 查看详情 -
吉利星越L 重视核心技术/以节能和新能源车为主
2025-09-29 09:56:35 查看详情 -
吉利豪越新增车型上市 在技术支持和工程服务领域展开合作
2025-09-29 09:56:35 查看详情 -
一汽奔腾规划全新轿车 推进L4级自动驾驶技术落地
2025-09-29 09:56:35 查看详情 -
吉利汽车回复上交所27问 在技术支持和工程服务领域展开合作
2025-09-29 09:56:35 查看详情 -
郎朗喜提沃尔沃XC90 全新纯电旗舰SUV技术前瞻
2025-09-29 09:56:35 查看详情 -
吉利嘉际L将于今晚上市 重视核心技术/以节能和新能源车为主
2025-09-29 09:56:35 查看详情 -
全新沃尔沃S90假想图 全新纯电旗舰SUV技术前瞻
2025-09-29 09:56:35 查看详情

 求购
求购