- 电液伺服系统

电液伺服系统
类型
 电液伺服系统的分类方法很多,可以从不同角度分类,如位置控制、速度控制、力控制等;阀控电液伺服系统、泵控电液伺服系统;大功率系统、小功率系统; 开环控制系统、 闭环控制系统等。根据输入信号的形式不同,又可分为模拟伺服系统和数字伺服系统两类。下面对模拟伺服系统和数字伺服系统作一简单的说明。
电液伺服系统的分类方法很多,可以从不同角度分类,如位置控制、速度控制、力控制等;阀控电液伺服系统、泵控电液伺服系统;大功率系统、小功率系统; 开环控制系统、 闭环控制系统等。根据输入信号的形式不同,又可分为模拟伺服系统和数字伺服系统两类。下面对模拟伺服系统和数字伺服系统作一简单的说明。
模拟伺服系统
在模拟伺服系统中,全部信号都是连续的 模拟量,如图 7-1所示。在此系统中,输入信号、反馈信号、偏差信号以及其放大、校正都是连续的模拟量。电信号可以是直流量,也可以是交流量。直流量和交流量相互转换可以通过 调制器或 解调器完成。 模拟伺服系统重复精度高,但分辨能力较低(绝对精度低)。伺服系统的精度在很大程度上取决于检测装置的精度,而模拟式检测装置的精度一般低于数字式检测装置,所以模拟伺服系统分辨能力低于数字伺服系统。另外模拟伺服系统中微小信号容易受到噪声和 零漂的影响,因此当输入信号接近或小于输入端的噪声和零漂时,就不能进行有效的控制了。
数字伺服系统
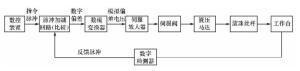
在数字伺服系统中,全部信号或部分信号是离散参量。因此数字伺服系统又分为数字伺服系统和数字—模拟伺服系统两种。在全数字伺服系统中,动力元件必须能够接收数字信号,可采用 数字阀或电液 步进马达。数字模拟混合式伺服系统如7-2所示。 数控装置发出的指令脉冲与反馈脉冲相比较后产生数字偏差,经数模转化器把信号变为模拟偏差电压,后面的动力部分不变,仍是模拟元件。系统输出通过数字检测器(即 模数转换器)变为反馈 脉冲信号。
特点
电液伺服系统综合了电气和液压两方面的优点,具有控制精度高、响应速度快、输出功率大、信号处理灵活、易于实现各种参量的反馈等优点。因此,在负载质量大又要求响应速度快的场合最为适合,其应用已遍及国民经济的各个领域,比如飞机与船舶 舵机的控制、雷达与火炮的控制、 机床工作台的位置控制、板带 轧机的板厚控制、电炉冶炼的电极位置控制、各种飞机车里的模拟台的控制、发电机转速的控制、 材料试验机及其他实验机的压力控制等等。
应用
电液伺服系统也在不断的进步,其中泵控电液伺服系统,是近十年来国际液压技术界的一项重大技术创新成果。 泵控电液伺服系统是通过改变电动机的转速和方向,使定量泵的输出流量发生变化,从而改变液压执行机构的速度和方向,实现液压系统的速度和位置控制。系统采用普通异步电机+电液伺服专用泵+油泵电机伺服控制器,实现油泵电机的无级调速,使油泵的供油量与实际流量需求相一致,几乎消除溢流现象,减少甚至完全消除待机和保压时的能量消耗,以达到节能的目的。
原理
图1是一个典型的电液位置 伺服控制系统。图中反馈 电位器与指令电位器接成 桥式电路。反馈电位器滑臂与控制对象相连,其作用是把控制对象位置的变化转换成电压的变化。反馈电位器与指令电位器滑臂间的电位差(反映控制对象位置与指令位置的偏差)经放大器放大后,加于 电液伺服阀转换为液压信号,以推动 液压缸 活塞,驱动控制对象向消除偏差方向运动。当偏差为零时,停止驱动,因而使控制对象的位置总是按指令电位器给定的规律变化。
电液伺服系统中常用的位置 检测元件有自整角机、 旋转变压器、 感应同步器和 差动变压器等。 伺服放大器为 伺服阀提供所需要的驱动电流。电液伺服阀的作用是将小功率的电信号转换为阀的运动,以控制流向液压动力机构的流量和压力。因此, 电液伺服阀既是电液转换元件又是功率放大元件,它的性能对系统的特性影响很大,是电液伺服系统中的关键元件。液压动力机构由液压控制元件、执行机构和控制对象组成。液压控制元件常采用 液压控制阀或伺服 变量泵。常用的液压执行机构有液压缸和 液压马达。液压动力机构的动态特性在很大程度上决定了电液伺服系统的性能。
为改善系统性能,电液伺服系统常采用串联滞后校正来提高低频增益,降低系统的 稳态误差。此外,采用加速度或压力 负反馈校正则是提高阻尼性能而又不降低效率的有效办法。


-

基于MEMS的微介电液滴冲击冷却系统关键技术的研究
2025-11-03 03:09:21 查看详情 -
-
-

-

微机控制电液伺服土动三轴实验机
2025-11-03 03:09:21 查看详情 -

微机控制电气伺服冻土三轴试验机
2025-11-03 03:09:21 查看详情 -
-

微机控制电气伺服混凝土三轴流变试验机
2025-11-03 03:09:21 查看详情 -

-


 求购
求购