- 空间交会对接

空间交会对接
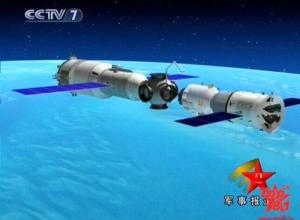
对接过程
 空间交会对接图册(5)一般是首先由地面发射追踪航天器,由地面控制,使它按比目标航天器稍微低一点的圆轨道运行;接着,通过霍曼变轨,使其进入与目标航天器高度基本一致的轨道,并与目标航天器建立通信关系;接着,追踪航天器调整自己与目标航天器的相对距离和姿态,向目标航天器靠近;最后当两个航天器的距离为零时,完成对接合拢操作,结束对接过程。
空间交会对接图册(5)一般是首先由地面发射追踪航天器,由地面控制,使它按比目标航天器稍微低一点的圆轨道运行;接着,通过霍曼变轨,使其进入与目标航天器高度基本一致的轨道,并与目标航天器建立通信关系;接着,追踪航天器调整自己与目标航天器的相对距离和姿态,向目标航天器靠近;最后当两个航天器的距离为零时,完成对接合拢操作,结束对接过程。
 空间交会对接图册(2) 空间交会对接图册(2) |
 空间交会对接图册(2) 空间交会对接图册(2) |
对接阶段
| 空间交会对接图册(2) |
空间交会对接图册(2) |
远程导引段
在交会对接过程中,追踪飞行器的飞行可以分为以下四个阶段:
 国际空间站就是通过若干舱段对接而成
国际空间站就是通过若干舱段对接而成
近程导引段
在地面测控的支持下,追踪飞行器经过若干次变轨机动,进入到追踪航天器上的敏感器能捕获目标飞行器的范围(一般为15~100千米)。
最终逼近段
追踪飞行器根据自身的微波和激光敏感器测得的与目标飞行器的相对运动参数,自动引导到目标飞行器附近的初始瞄准点(距目标飞行器0.5~1千米)。
对接停靠段
追踪飞行器首先捕获目标飞行器的对接轴,当对接轴线不沿轨道飞行方向时,要求追踪飞行器在轨道平面外进行绕飞机动,以进入对接走廊,此时两个飞行器之间的距离约100米,相对速度约1~3米/秒。
控制类型
追踪飞行器利用由摄像敏感器和接近敏感器组成的测量系统精确测量两个飞行器的距离、相对速度和姿态,同时启动小发动机进行机动,使之沿对接走廊向目标最后逼近。在对接前关闭发动机,以0.15~0.18米/秒的停靠速度与目标相撞,最后利用栓-锥或异体同构周边对接装置的抓手、缓冲器、传力机构和锁紧机构使两个飞行器在结构上实现硬连接,完成信息传输总线、电源线和流体管线的连接。
遥控操作
航天器空间交会对接技术的实施必须由高级控制系统来完成,根据航天员及地面站的参与程度可将控制方式划分为如下四种类型:
手动操作
追踪航天器的控制不依靠航天员,全部由地面站通过遥测和遥控来实现,此时要求全球设站或者有中继卫星协助。
自动控制
在地面测控站的指导下,航天员在轨道上对追踪航天器的姿态和轨道进行观察和判断,然后动手操作。这是比较成熟的方法。
自主控制
不依靠航天员,由船载设备和地面站相结合实现交会对接。该控制方法亦要求全球设站或有中继卫星协助。
对接机构
不依靠航天员与地面站,完全由船上设备自主实现交会对接。
“环-锥”式
按不同的结构和原理,空间对接机构有四种:
“杆-锥”式
“环-锥”式机构是最早期的对接机构,它由内截顶圆锥和外截顶圆锥组成。内截顶圆锥安装在一系列缓冲器上,使它能吸收冲击能量。这种结构曾用于美国的“双子星座”飞船与“阿金纳”火箭以及美国“双子星座”飞船之间的对接等。
“异体同构周边”式
“杆-锥”式机构(也叫“栓-锥”式结构)是在两个航天器对接面上分别装有栓和锥的对接机构,即一个航天器的对接机构内装有接收锥,另一个航天器上装有对接碰撞杆,在对接时,碰撞杆渐渐指向接收锥内,接收锥将杆头锁定。由于这种对接结构不具备既有主动又有被动的功能,所以不利于实施空间营救。俄罗斯“联盟”飞船与“礼炮”号空间站、“联盟TM”飞船与“和平”号空间站,美国“阿波罗”登月舱与指令舱等的对接,都曾采用这种对接机构。
“抓手-碰撞锁”式
“异体同构周边”式对接机构可以克服“杆-锥”式机构的缺点,因为它满足了下面两个要求:
①对接机构是异体同构,使航天器既可作主动方,也能作被动方,这一点对空间救援特别重要;
②对接机构必须是周边的,即所有定向和动力部件都安装于中央舱口的四周,从而保证中央成为来往通道空间。苏联“联盟-19”飞船与美国“阿波罗-18”飞船、航天飞机与“和平”号空间站、航天飞机与国际空间站等对接,都采用这种对接机构。其中,航天飞机与国际空间站的对接虽然仍采用“异体同构周边”对接机构,但增加了先进的综合测量系统,包括GPS导航接收系统、数据跟踪与中继导航与通信接收系统、微波交会雷达系统、激光对接雷达系统、光学对接摄像系统等,此外,还包括航天员显示装置(空间六分仪、望远镜、显示器、荧光屏等)。
测量系统
“抓手-碰撞锁”式机构是欧洲、日本研制的十字交叉和三点式对接机构。这两种机构实际上性质相同,只是布局上的差别。前者在周边布置四个抓手与撞锁,后者在周边布置三个抓手与撞锁。这两种对接机构都是无密封性能、无通道口的设计,适合与不载人航天器之间的对接,如无人空间平台、空间拖船等。
对接航天器
先进的测量系统可以称作是航天器间进行交会与对接时的眼睛。
俄罗斯飞船与空间站对接使用的交会测量系统最早叫“针”,后来增加了数字计算机又改名为“航向”。“航向”测量系统具有可靠性高、作用距离远的特点,尤其是不需要庞大的“和平”号空间站作任何机动和姿态变化,航天员也可借助显示器和键盘进行手动控制。该系统在中远距离采用S频段微波雷达,近距离有激光测距仪、目视光学瞄准器。其S频段微波雷达装在飞船上,包括自动导引头、测距仪和径向速度测量装置;空间站上设有信标、应答机和通信设备等相应的搜索、捕获定向敏感器。“航向”系统共有9部天线组成搜索捕获和跟踪测量系统(追踪航天器上5部,目标航天器上4部),其中6部天线用于搜索捕获和初定向,1部用于停靠阶段定向,2部用于相互跟踪、相对运动测量和停靠阶段定向。用于搜索的天线为螺盘天线,用于跟踪的为抛物面天线。
美国“双子星座”飞船与“阿金纳”火箭对接,使用的交会测量系统为L频段非相干脉冲微波交会雷达、目视光学瞄准器。其中雷达作用距离为150米~450千米,目标航天器上安装应答机,由航天员通过光学瞄准器以手控方式进行交会与对接操作。美国“阿波罗”飞船指令舱与登月舱对接,使用的交会测量系统为X频段单脉冲连续波雷达、目视光学瞄准器。“阿波罗”与“联盟”飞船对接也采用这套测量系统。美国航天飞机与空间站对接,使用的交会测量系统是Ku频段脉冲多普勒雷达、目视光学瞄准器。它具有通信、收发功能,作用范围为30米~220千米,但接近与对接仍由手动完成。
近年来,激光雷达因具有可固化、重量轻、体积小,以及测量精度高、易于测量相对姿态的优点而倍受青睐。但它在国际交会与对接中尚处于试验阶段。而GPS导航定位技术相对成熟,已对空间交会与对接提供了有力的支持。
技术前景
在空间交会与对接的两个航天器中,一个称目标航天器,一般是空间站或其他的大型航天器,是准备对接的目标;另一个称追踪航天器,一般是地面发射的宇宙飞船、航天飞机等,是与目标航天器对接的对象。对接对象也可以是太空中失控的或出现故障的航天器。
航天器之间在空间进行对接时要先交会,即相互接近,它是一个航天器接近另一个航天器的过程。具体地说,就是在太空飞行中,两个或两个以上的航天器通过轨道参数的协调,在同一时间到达空间同一位置的过程。
两个航天器交会后要调整各自的位置,使两个航天器之间逐步达到零距离,最终启动对接机构实现对接,在机械上联成一体,形成更大的航天器复合体。
国内项目
在未来的空间交会与对接测量技术发展中,微波交会雷达仍将是可靠的远距离测量手段之一,并由L、S、C频段向Ku频段和毫米波频段发展;在最后逼近和对接阶段,光学成像敏感器有更突出的优点,所以也是国际上普遍使用的敏感器;激光雷达的优点是波束窄、分辨率高、体积小、重量轻、精度高,适合于近距离测量,在各国得到广泛重视;GPS差分测量可大大提高测量精度,日本、欧空局都将GPS作为交会对接过程中的辅助测量手段。交会对接在测量方法上已由依靠地面的非自主式测量过渡到不依靠地面的自主式测量;由航天员操作的非自主式对接发展到不依赖于航天员的自动对接。
无人航天器也广泛使用交会与对接技术。例如,美国轨道复活公司研制的“轨道延寿飞行器” 装有一种“万能”锥型接口装置,它可与寿命终止的通信卫星的远地点发动机对接,构成卫星与推进舱的组合体,然后为组合体提供轨道保持和姿态控制能力,从而延长在轨通信卫星的工作寿命。美国还把自主交会对接技术用于“轨道快车”项目,它可像空中加油机一样为“有病”的卫星治疗、加注推进剂,利用这一技术也可以直接捕获敌方卫星。
神八对接
神九对接
项目计划
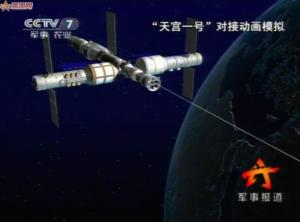
中国载人航天项目工程新闻发言人2011年9月20日宣布,中国将实施 载人航天工程首次空间交会对接任务,执行任务的 天宫一号目标飞行器、长征二F 运载火箭组合体已从 酒泉卫星发射中心 垂直总装测试厂房顺利转运至 发射区。天宫一号已于2011年9月29日21时16分03秒507毫秒发射。
按照计划,首次交会对接任务,将首先发射天宫一号目标飞行器,之后发射神舟八号飞船,实施无人自动交会对接试验。天宫一号飞行的主要任务是,为实施航天器空间交会对接飞行试验、突破和掌握交会对接技术提供交会对接目标,初步建立长期无人在轨运行、短期有人照料的载人空间试验平台,为空间站研制积累经验,进行空间科学实验、航天医学实验和空间技术试验。
首次对接成功
从对接机构接触开始,经过捕获、缓冲、拉近、锁紧4个步骤,“ 神舟八号”飞船与“天宫一号”目标飞行器于2011年11月3日凌晨实现刚性连接,形成组合体,中国载人航天首次空间交会对接试验获得成功。
这两个航天器组合体飞行段由“天宫一号”目标飞行器负责组合体飞行控制,“神舟八号”飞船处于停靠状态。按照计划,组合体飞行12天左右,将进行第二次交会对接试验。
对接成功意义
“神舟八号”与“天宫一号”交会对接成功,为中国突破和掌握航天器空间交会对接关键技术,初步建立长期无人在轨运行、短期有人照料的载人空间试验平台,开展空间应用、空间科学实验和技术试验,以及建设载人空间站奠定基础、积累经验。
后续计划
天宫一号/神舟八号交会对接任务是首次无人自动交会对接试验,根据中国载人航天工程交会对接的任务规划,2012年内将开展“神舟九号”、“神舟十号”与“天宫一号”的空间交会对接试验,其中至少有一次是载人飞行。
神十对接
项目概述
6月16日18时37分21秒,中国“ 长征二号F”遥九运载火箭在酒泉卫星发射中心 载人航天发射场点火起飞,10分钟后准确入轨,将 神舟九号载人飞船顺利送入太空。
美国媒体也纷纷发表文章,高度关注中国神舟九号飞船发射与天宫一号对接,以及中国第一个飞向太空的女性——33岁的宇航员刘洋。
神舟九号飞船的发射显示中国的太空技术继续向前跨越,中国未来应能独立建造出永久的大型空间站。若非美国的阻挠,中国在目前的国际空间站发挥更大的作用。神舟八号与天宫飞船的成功对接将奠定神舟九号顺利完成任务的基础。
至此,中国成为继俄罗斯和美国后第三个掌握空间交会对接技术的国家。
首次载人对接成功
2012年6月18日14时许,在完成捕获、缓冲、拉近和锁紧程序后,神舟九号与天宫一号紧紧相牵,中国首次载人交会对接取得成功。对接完成、两飞行器形成稳定运行的组合体后,航天员将于17时22分进入天宫一号目标飞行器。
神舟九号飞船于16日傍晚搭载3名航天员进入太空。根据既定的飞行方案,飞船将在轨飞行十余天,与天宫一号目标飞行器进行两次交会对接,第一次为自动交会对接,第二次由航天员手动控制完成。
根据飞行方案,神舟九号与天宫一号自动对接形成组合体后,航天员将在地面指挥与支持下,完成组合体状态设置与检查,依次打开各舱段舱门,通过对接通道进入天宫一号实验舱。
组合体飞行期间,由目标飞行器负责飞行控制,飞船处于停靠状态。3名航天员将在飞船轨道舱内就餐,在天宫一号内进行科学实验、技术试验、锻炼和休息。
此后,3名航天员将返回飞船,依次关闭各舱段舱门。飞船自主撤离至距目标飞行器约400米处,然后自主控制接近目标飞行器,在140米处停泊,转由航天员手动控制。航天员随后将通过操作姿态和平移控制手柄,瞄准目标飞行器十字靶标,控制飞船逐步接近目标飞行器,至对接机构接触,完成手控交会对接。3名航天员再次进入天宫一号驻留。
载人对接的重大意义
神舟九号将与天宫一号目标飞行器进行我国首次载人空间交会对接,这意味着中国的飞船将成为真正的载人天地往返工具,能把人送到空间站或者空间实验室中去。这将是中国载人航天史上具有重大意义的一步。
对中国来说,成功的载人对接任务是在2020年前后建立空间站计划的重要一步,这不仅将是其不断增长的太空能力的最新展示,同时还将与其日益扩张的军事和外交影响力相匹配。
2012年6月18日,载着景海鹏、刘旺、刘洋三名航天员的神舟九号飞船与天宫一号目标飞行器实现自动交会对接,这是中国实施的首次载人空间交会对接。这是历史性的跨越。
2012年6月18日17时07分左右,中国航天员首次进驻天宫一号。
梦天舱对接
2013年6月11日,神舟十号顺利升空。至6月13日,神十已进入预定轨道,并于6月13日中午神舟十号与天宫一号进行首次交会对接。在这次中国迄今为止时间最长的太空飞行中,聂海胜、张晓光、王亚平3名航天员,将在太空工作生活15天。神舟十号飞船将先后与天宫一号进行1次自动交会对接和1次航天员手控交会对接。
空间站对接
2022年10月31日15时37分,在长征五号B遥四运载火箭的托举下,空间站梦天实验舱成功升空入轨。[3]11月1日4时27分,空间站梦天实验舱成功对接于天和核心舱前向端口,整个交会对接过程历时约13小时。[1]
词条图册
2023年6月6日3时10分,前期撤离空间站组合体、已独立在轨飞行33天的天舟五号货运飞船,完成与空间站组合体再次交会对接。这是中国空间站建成后首次同时与一艘神舟载人飞船、两艘天舟货运飞船构成组合体。神舟十五号载人飞船与空间站组合体分离、天舟五号货运飞船与组合体再次对接后,空间站组合体由天和核心舱、两个实验舱和一艘载人飞船、两艘货运飞船构成,规模比此前更大。[2]


-

实拍江铃新宝典(图文) 空间满足家用
2025-09-28 02:08:05 查看详情 -
江铃域虎7商乘全能铸就经典 空间满足家用
2025-09-28 02:08:05 查看详情 -
江铃福特轻客持续打造最优TCO 空间满足家用
2025-09-28 02:08:05 查看详情 -
-
-

-
-

航天恒星空间技术应用有限公司
2025-09-28 02:08:05 查看详情 -

-
上海车展实拍江铃福特领裕 空间满足家用
2025-09-28 02:08:05 查看详情

 求购
求购